PC와 딥코 미니를 연결해주는 필수 프로그램 설치 파일
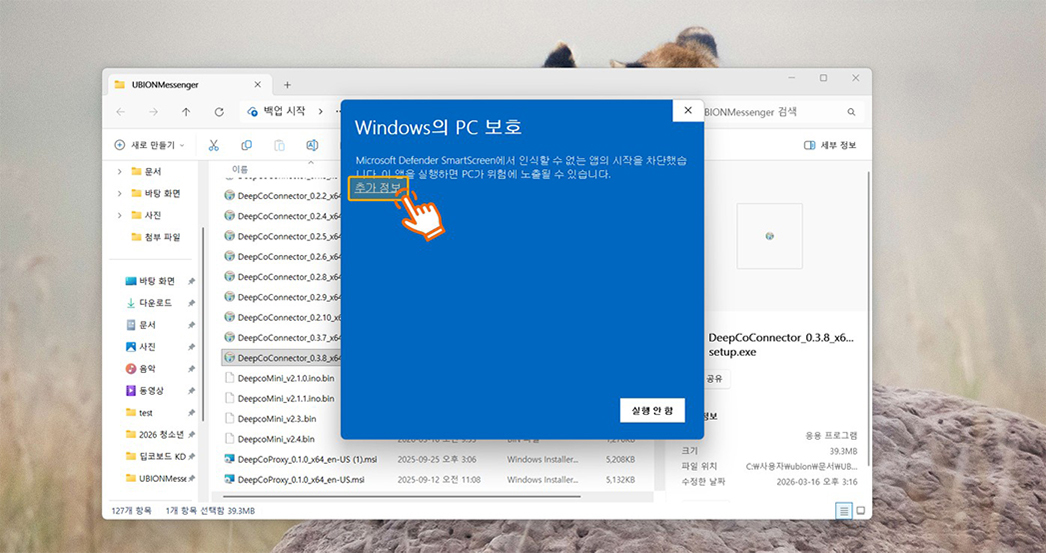
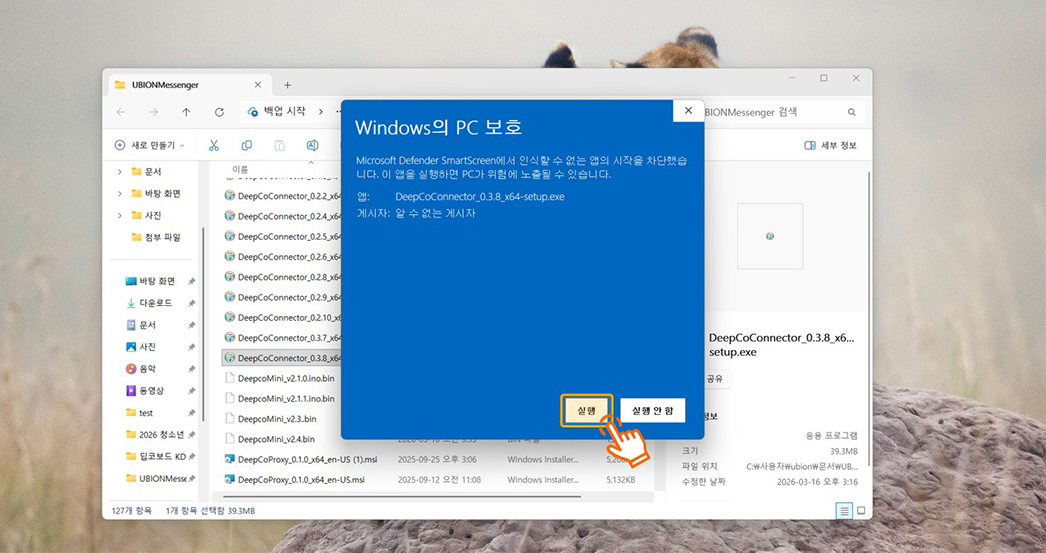
다운로드한 .zip 파일의 압축을 풀고 설치 파일(.exe)을 실행해 주세요.
.zip
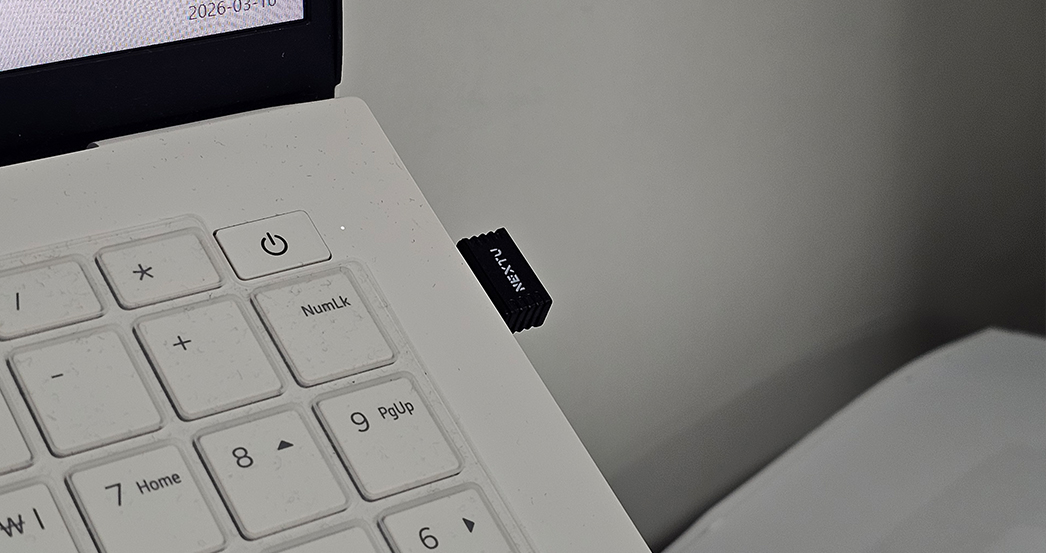
설치가 성공적으로 완료되었다면, 딥코 미니 상자에 동봉된 하얀색 통신용 USB 동글을 PC에 연결해 주세요.
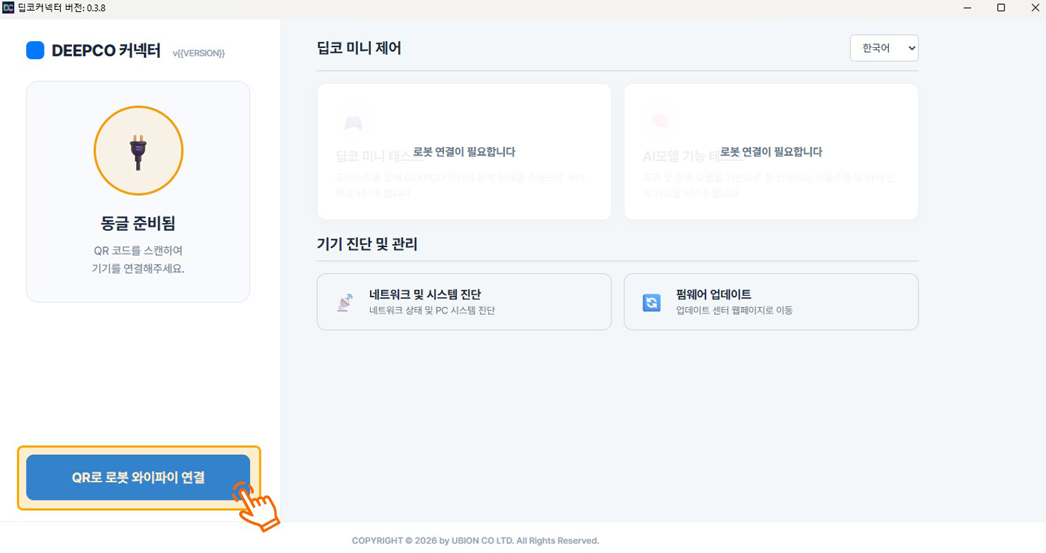
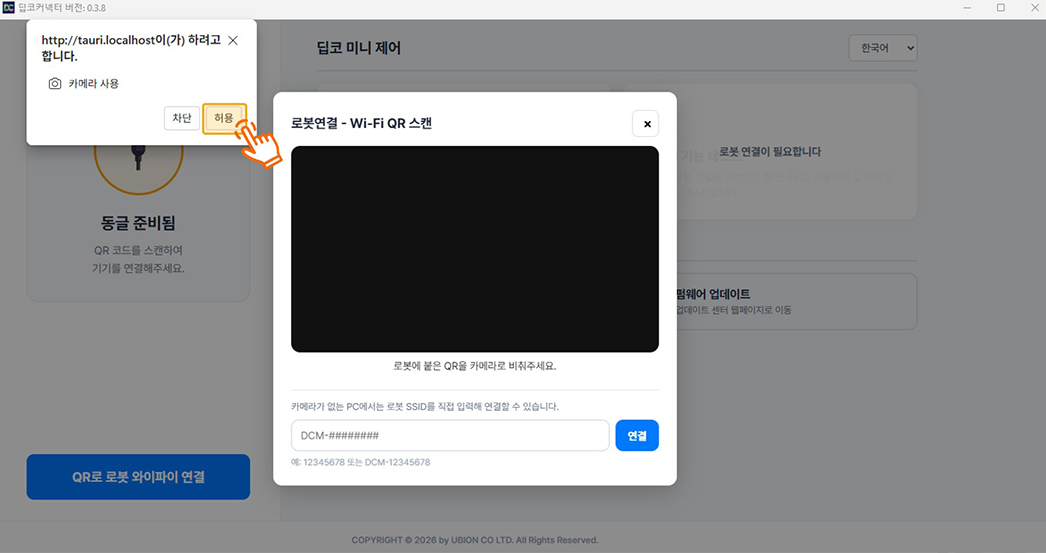
딥코 미니 로봇의 전원을 켜주세요. 바탕화면의 딥코 커넥터 프로그램을 실행하면 로봇과 자동으로 페어링됩니다.
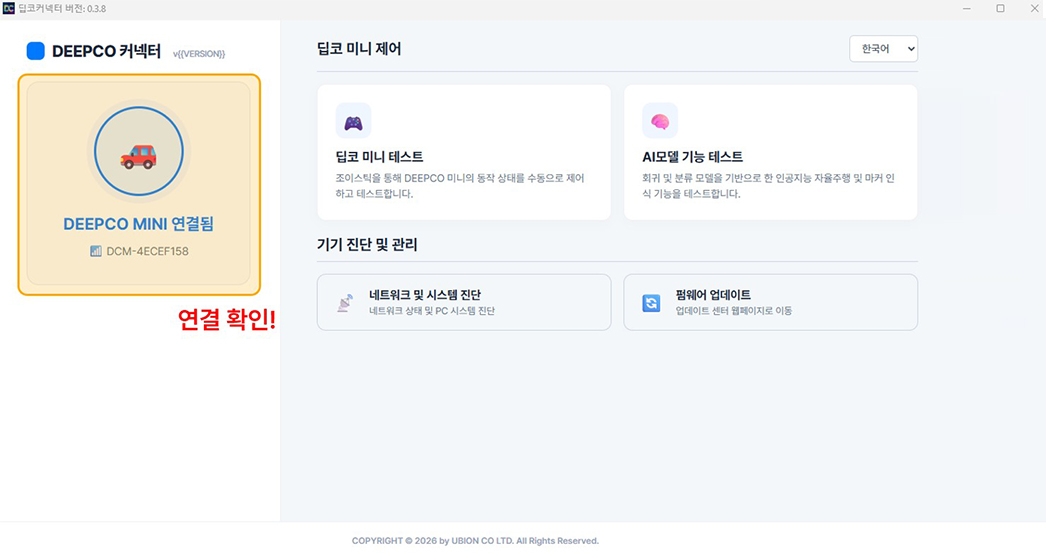
연결이 완료되었습니다! 이제 무엇을 해볼까요?
모터와 카메라가 정상인지 부품을 점검하고, 기본 제공 모델로 로봇이 잘 굴러가는지 즉시 테스트해 봅니다.
본격적인 시작! 스튜디오 웹으로 이동하여 직접 AI 자율주행 모델을 학습시키고 제어 앱을 만듭니다.